制御理論の応用研究として倒立振子などの不安定なシステムの制御について検討しています.
 img/inverted_pendulum.jpg
img/inverted_pendulum.jpgimg/inverted_pendulum.jpg
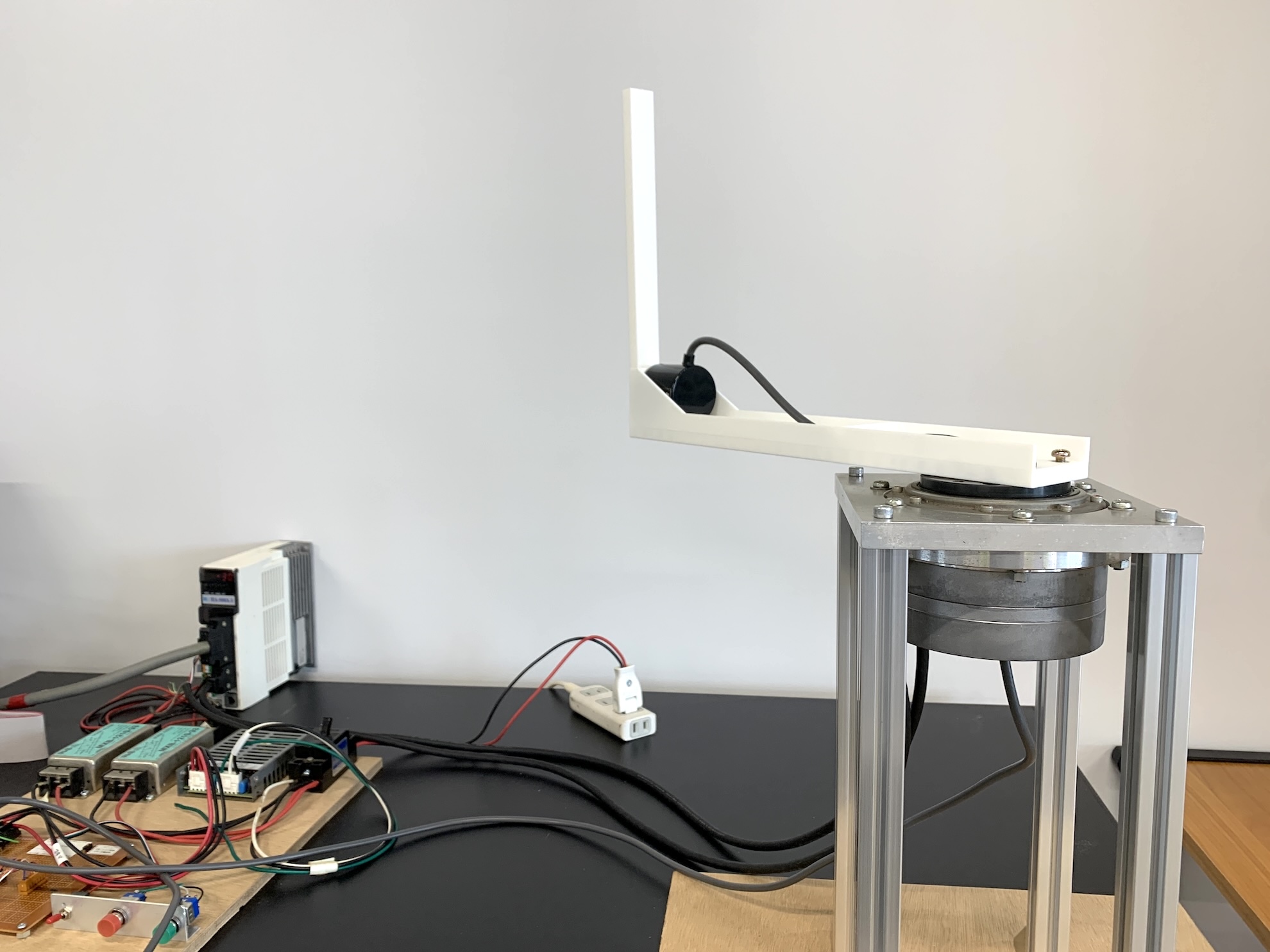
写真の回転型倒立振子は不安定だけでなく非線形が強いシステムとして制御理論の適用例としてよく用いられています.
通常では倒立状態の近傍で線型近似したモデルに対して線形制御理論を適用して設計したコントローラを用いますが,振子の大きな傾きには対応できません.
本研究では,非線形フィードバックによる線型化の手法に基づいて,システムを部分的に線型化し,その上で全体を線形近似する二段階線型化という手法を提案し,コントローラの切り替えなしに振り上げ制御を実現しています.