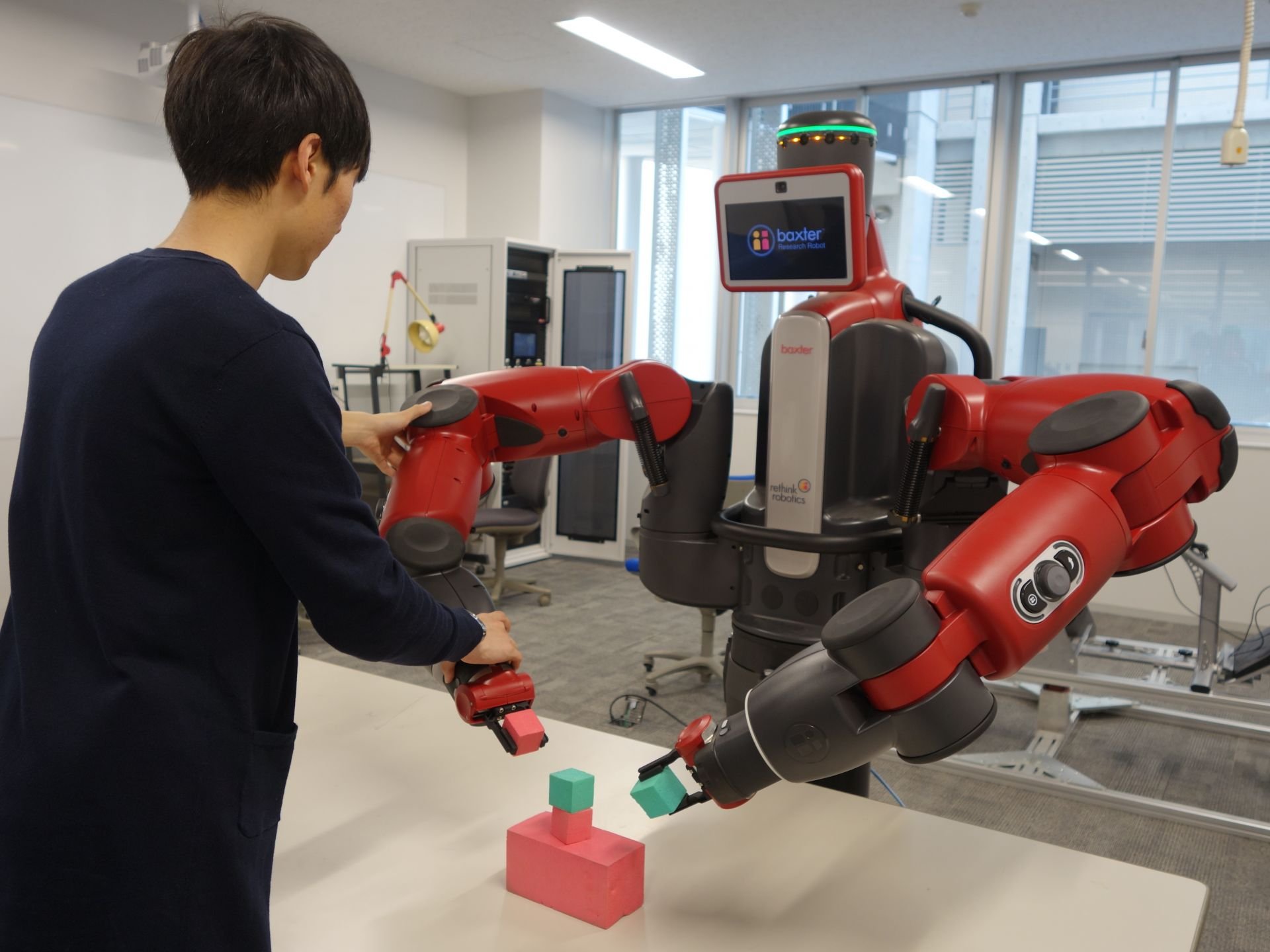
HMDを通じて現実空間に投影した仮想ディスプレイで作業マニュアルや拡大鏡を表示して作業を支援するシステムについて検討しています.
 img/com.oculus.vrshell.jpg
img/com.oculus.vrshell.jpgimg/com.oculus.vrshell.jpg
HMDを通じて現実空間に投影した仮想ディスプレイで作業マニュアルや拡大鏡を表示して作業を支援するシステムについて検討しています.
img/com.oculus.vrshell.jpgimg/com.oculus.vrshell.jpg
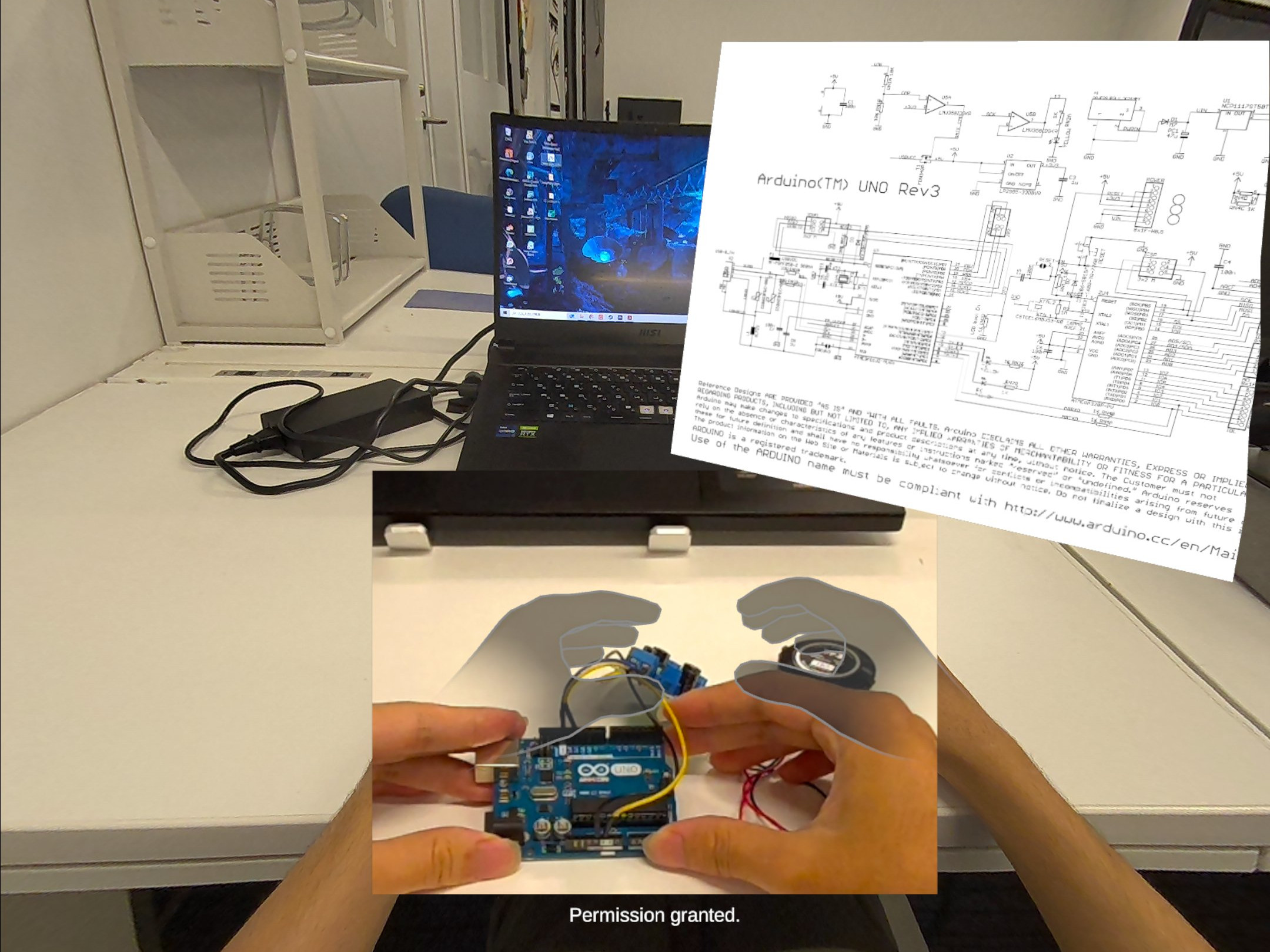
制御理論の応用研究として倒立振子などの不安定なシステムの制御について検討しています.
 img/inverted_pendulum.jpg
img/inverted_pendulum.jpgimg/inverted_pendulum.jpg
レースゲーム中の加減速やカーブに応じて働く慣性力を,シートの傾きで感じさせるレーシングシミュレータを開発しています.
 img/racing_simulator_study.jpg
img/racing_simulator_study.jpgimg/racing_simulator_study.jpg
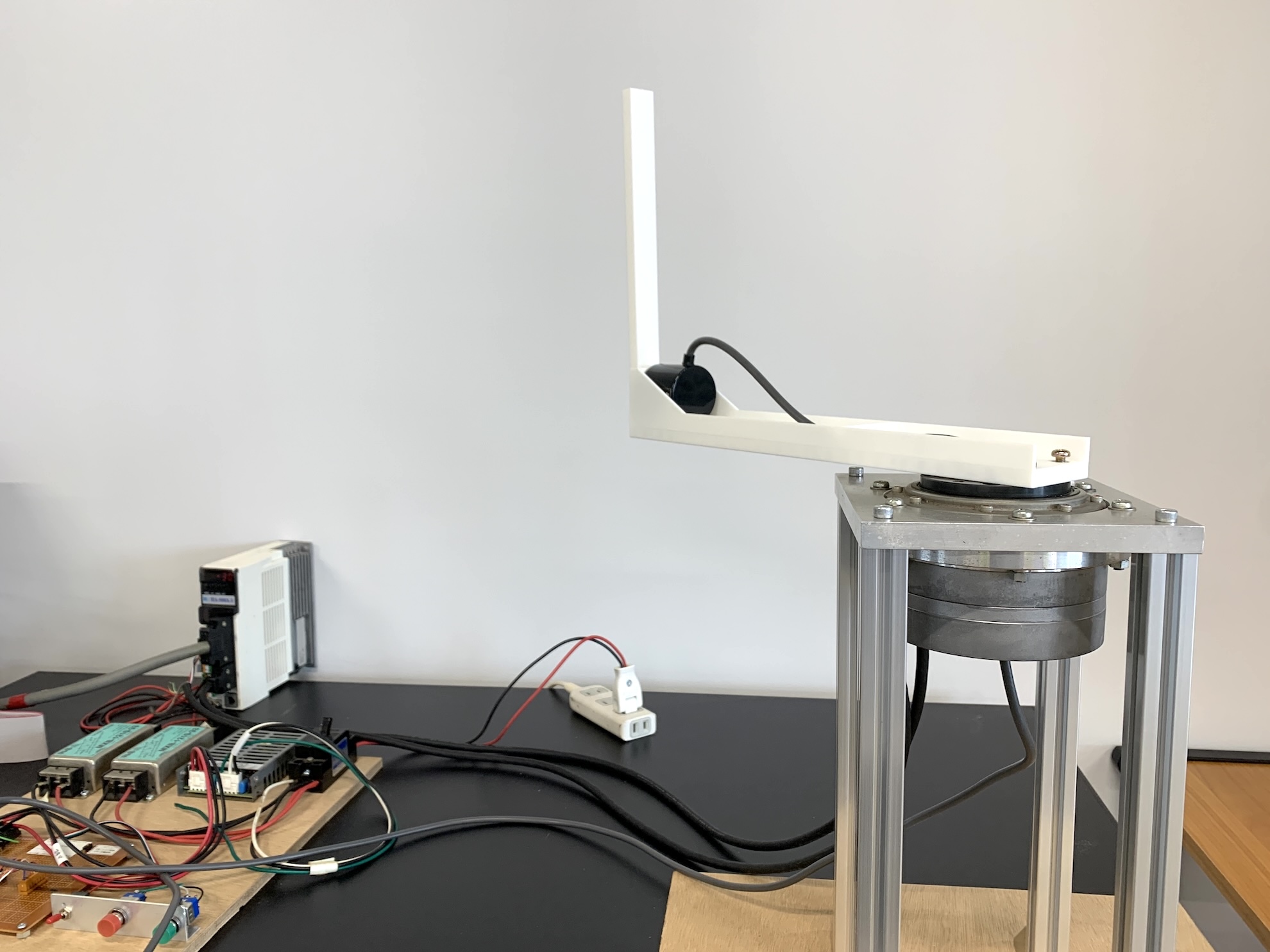
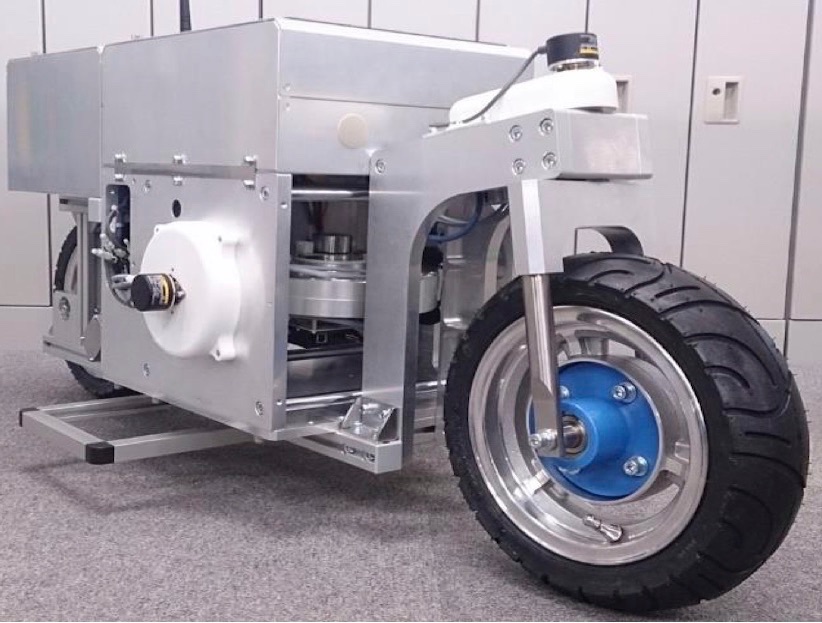
CMG(Control Moment Gyro,ジャイロアクチュエータ)によるドローンやバイクの姿勢制御について研究しています.
 img/CMGbike.jpg
img/CMGbike.jpgimg/CMGbike.jpg
 img/CMGdrone.jpg
img/CMGdrone.jpgimg/CMGdrone.jpg