東海大学 稲葉研究室
メンバー
研究紹介
ブログ
連絡先
研究室Wiki
研究プロジェクト
検索
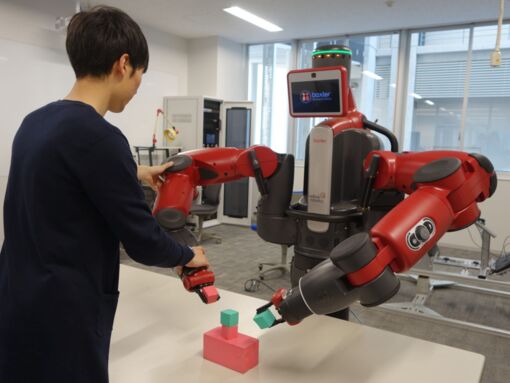
人間とロボットの協調作業に関する研究
作業者の姿勢と作業方向を考慮したパワーアシストの制御
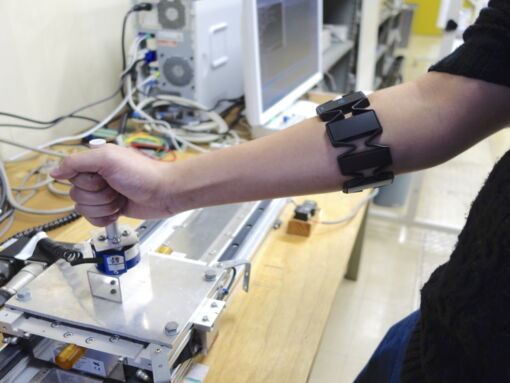
位置決めしやすいパワーアシストシステムの制御
立体視仮想作業系における操作性向上に関する研究
人間の体感特性を考慮したレーシングシミュレータの開発
CMGによる無人バイクの自立制御
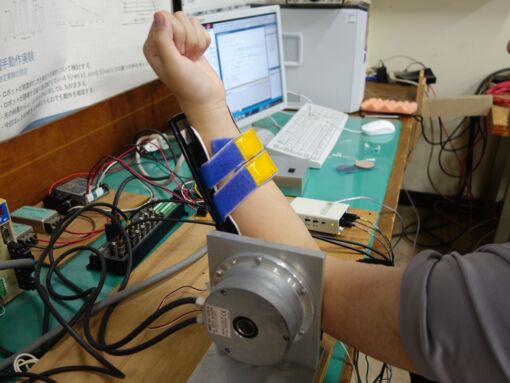
表面筋電位を利用した操作力の能動成分に基づくパワーアシスト制御